


In this series of articles, we will discuss in detail what it takes for a radar to generate a perception for a self driving car. Starting from scratch, we will build up from the basic principles of radar covering signal propagation and target response generation. Then we will deep dive into Range Doppler generation needed to localize the target real time.
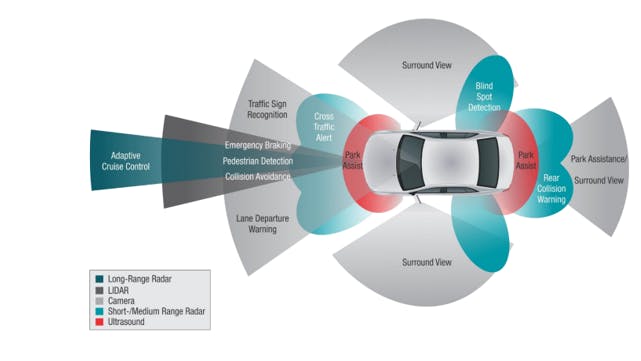
Radars have been in use since 1930s when they were primarily used by the military to detect aircraft, but since then the radar technology has come a long way and today they are increasingly being used as automotive radar sensor for advanced driver assistance systems (ADAS). The image below shows how radar sensors are used along with a full suite of other sensors in an autonomous vehicle:
Why do Self-driving cars use Radar?
Let's start first by mentioning the reasons that make Radars one of the main components in any sensor fusion suite for a SDC.
- One of the biggest advantages of Radar is that: It measures the radial velocity directly, this helps to distinguish between stationary and moving objects. Other sensors need to calculate velocities by using derivatives.
- Automotive radars are cost-driven, small, and with low power consumption. The automotive radars can easily fit beneath the front grill or the bumper.
- The frequency of electromagnetic energy used for radar is unaffected by darkness and also penetrates fog and clouds. This permits radar systems to determine the position of road targets that are invisible to the naked eye because of distance, darkness, or weather. This makes Radars cover the domains where LIDAR or camera may fail.
- A radar unit can cost as low as a few hundred dollars, allowing a car manufacturer to deploy multiple Radar sensors for 360 degree perception.
One can find many of articles comparing the LIDAR and RADAR, but in practice, these sensors are complementary to each other. LIDAR can generate high resolution imaging based on reflection of the laser light off from the targets. But LIDAR fails in bad weather conditions as the very small wavelength doesn’t allow to work well in fog or rain. Additionally, LIDAR is an expensive sensor with costs varying from $35,000 to $100,000 as of 2019. However, it is the preferred technology at Waymo.
Radar lacks the capability to generate a high resolution image, but it has highly accurate velocity estimation based on the doppler phenomenon, which we will cover in more detail later in this series of blog posts. Also, radar wavelength allows it to sense the targets in bad weather conditions as well. Most important is the low manufacturing cost for a Radar. A radar unit can cost as low as a few hundred dollars, allowing a car manufacturer to deploy multiple Radar sensors for 360 degree perception. Tesla relies on Radar as its primary sensor and doesn’t include LIDAR in its sensor fusion system.
Radar Operation
A radar is composed of the following parts:
- A component that produces EM waves
- An antenna used to transmit and receive the radar signal
- A processing model for detecting the object properties
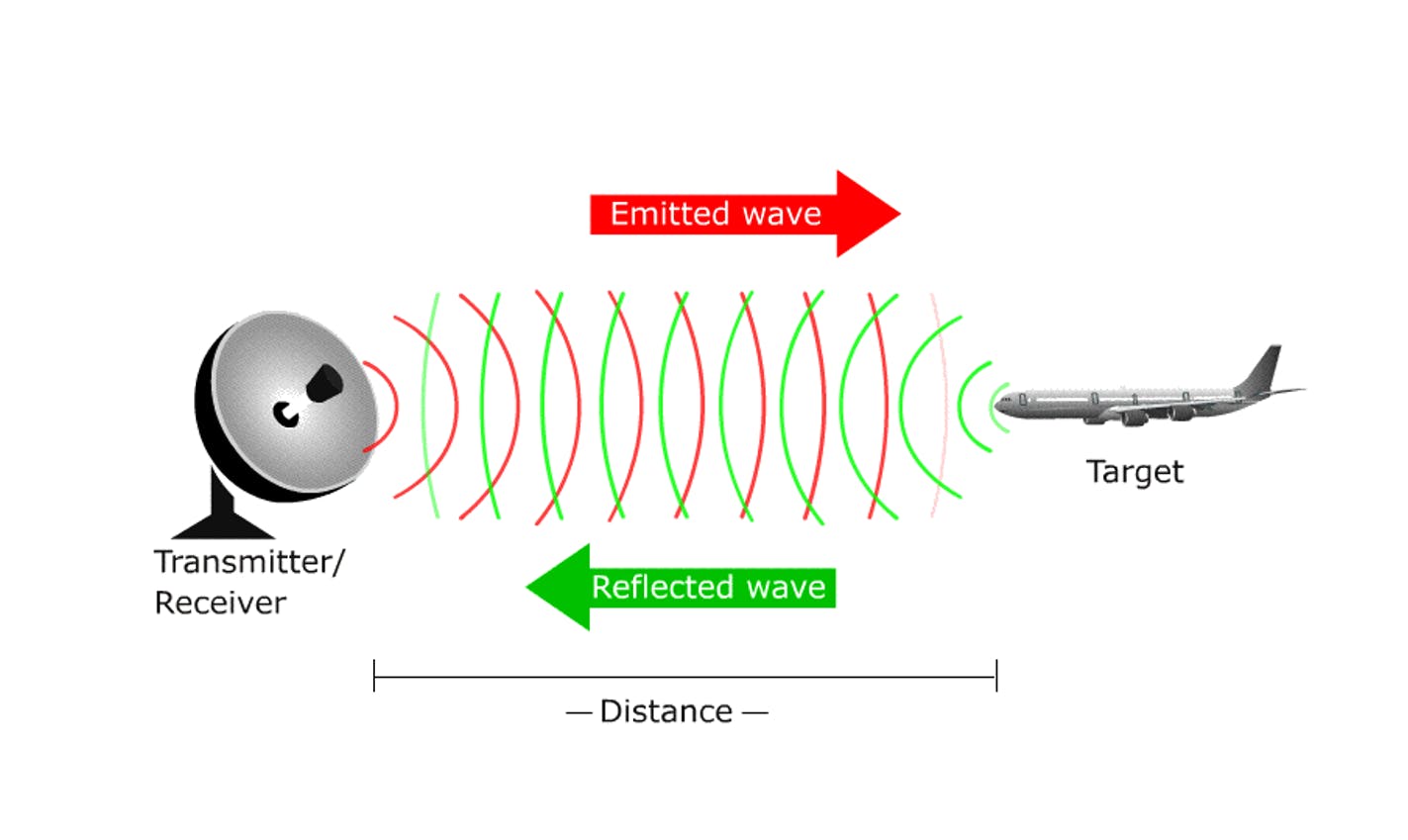
The electromagnetic waves are reflected if they meet an obstacle. If these reflected waves are received again at the place of their origin, then that means an obstacle is in the propagation direction.
Signal Properties
In order to understand how Radars operate, we have to know about signals and how they propagate. We will see a general overview of signal properties, including definitions of the wavelength of a signal and the general form for the equation of a signal. I will make it as short as I can. Signals are boring anyway :D
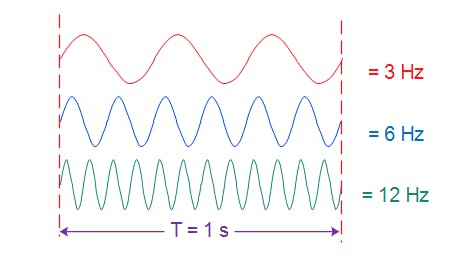
Wavelength (λ) is the physical length from one point of a wave to the same point on the next wave, and it is calculated as: λ = speed of light / frequency
The higher the frequency the smaller the wavelength. The automotive radar generally operates at W band (76 GHz - 81 GHz).
Bandwidth (BW) of a signal is the difference between the highest and the lowest frequency components in a continuous band of frequencies.
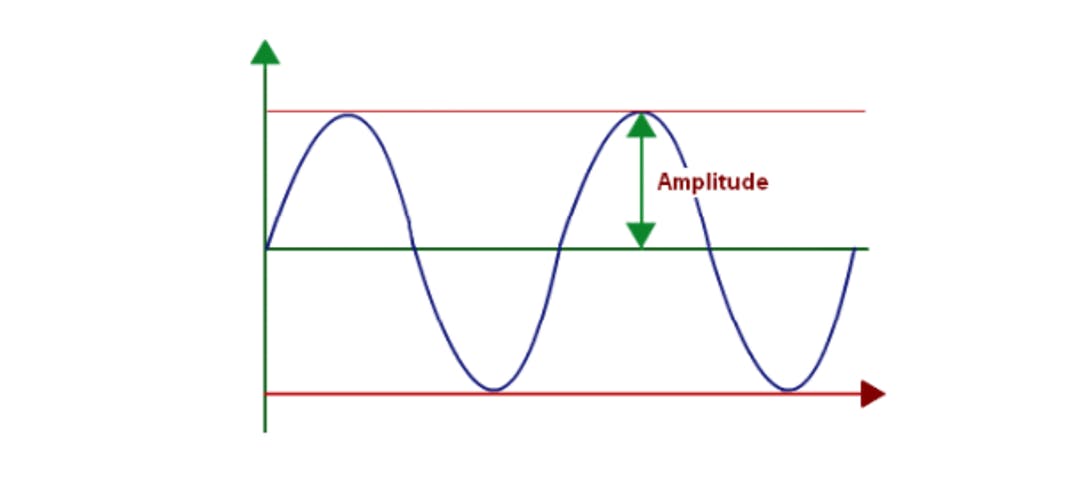
Amplitude (A) is the strength of the signal. It corresponds to the power of the RF signal/electromagnetic field defined in dB/dBm. It is relevant while configuring the output power of the radar and sensing the received signal. Higher the amplitude of the Radar signal, more is the visibility of radar. Automotive Radar can operate at max of 55 dBm output power (316 W).
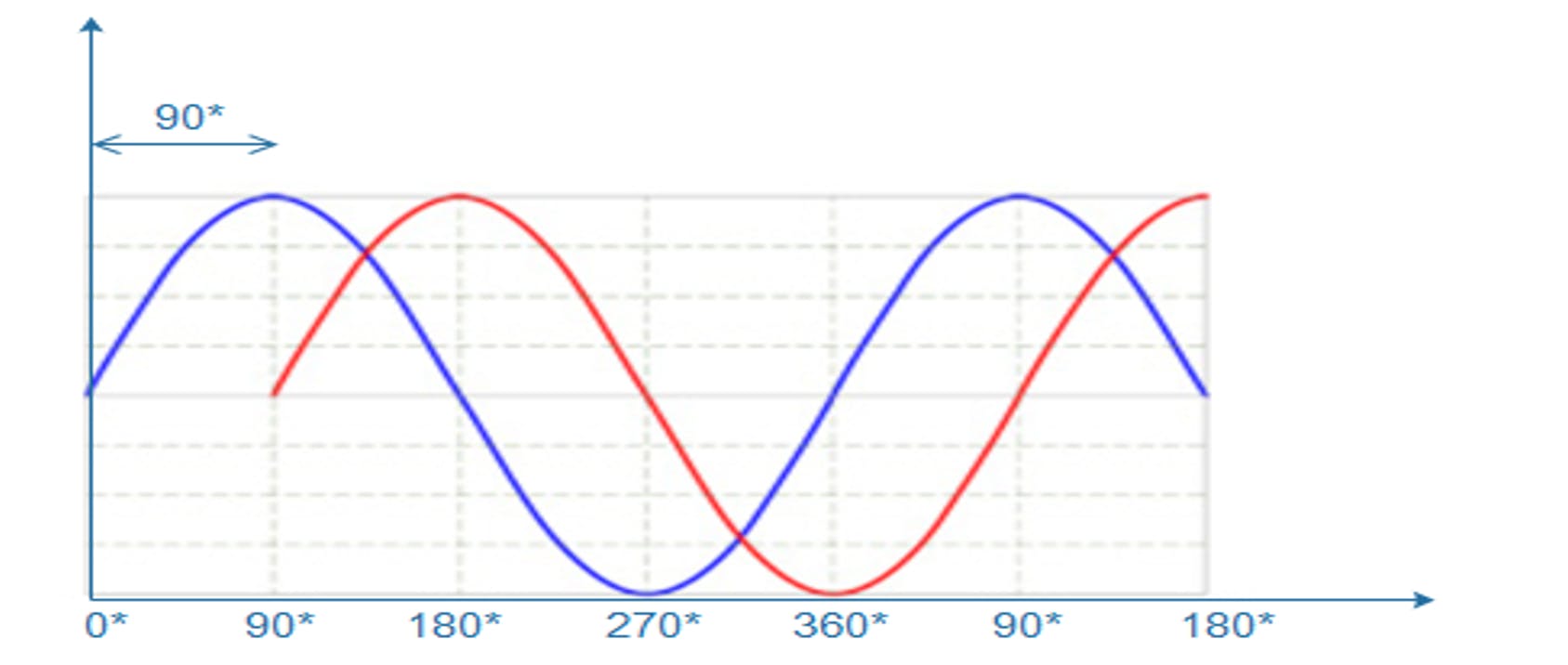
Phase (𝜑) is a particular point in time on the cycle of a waveform, measured as an angle in degrees: frequency = 𝜑 / dt
The phase information processing is important as we go through doppler processing as well as Angle of Arrival techniques for radar in future blog posts.
Wave Equation for a traveling wave in space is defined as: y(t) = A Cos(2π . fc . t +𝜑)
Below, the variables in the equations are defined:
- A is the amplitude of the signal
- fc is the signal frequency
- 𝜑 is the phase of the signal
Let’s wrap up
We have gone through the main principles of wave propagation and defined some basic concepts. In the next article, we will take a look at FMCW radar (Frequency-Modulated Continuous Wave radar) and understand how it calculate range and velocity.
You may wonder, how radars algorithms are implemented and what software tools or even programming languages are involved in this area. Well, here is a short read to widen your perspective on how things are done in the industry :)